通信导航产品
桥楼值班报警
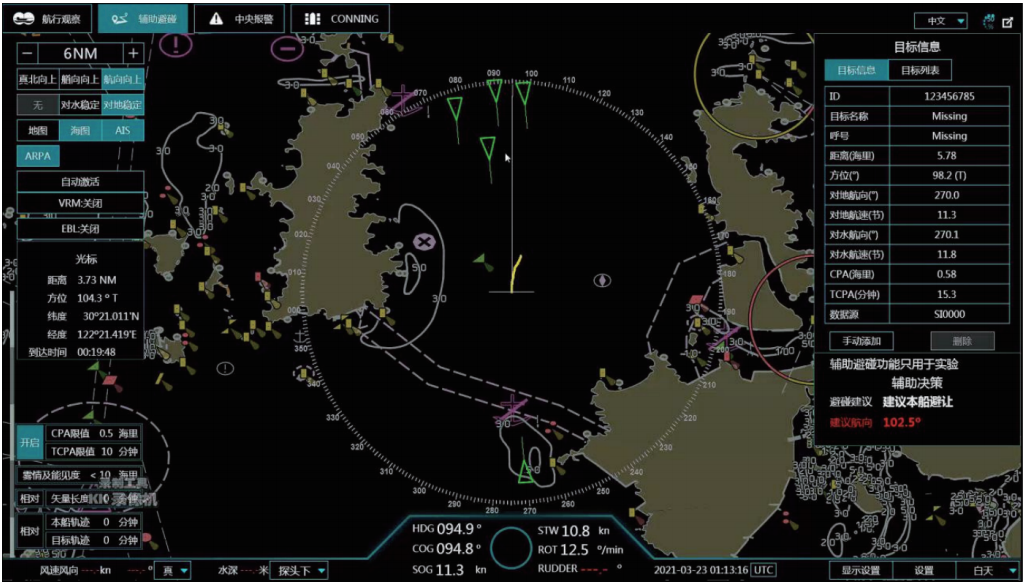
智慧桥综合导航系统
船舶操舵控制系统
舵角指示器
风速风向仪气象仪(AM/AMD)
陀螺罗经
智能化产品
智能集成平台系统
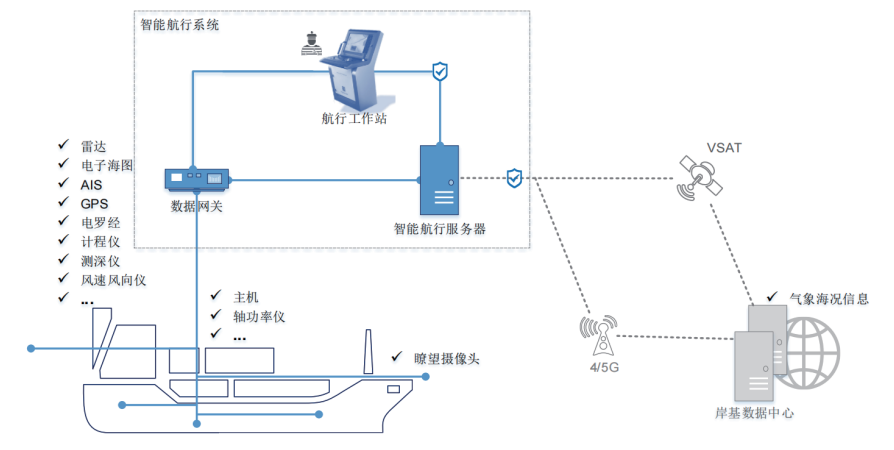
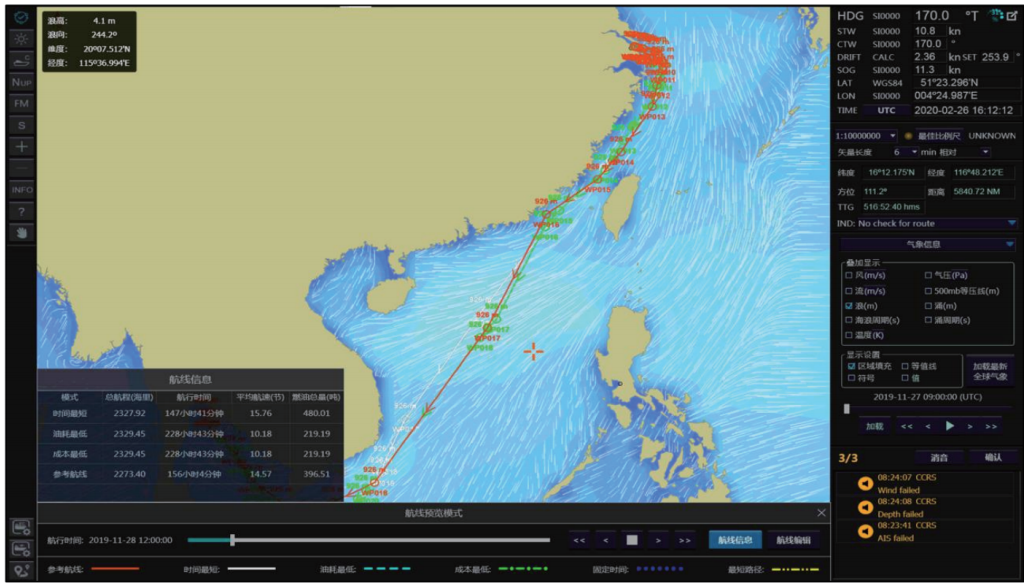
智能助航系统
智能岸基管理系统
智能能效系统
智能设备运维系统
智能航行系统
智能视频监控系统
机舱自动化
深海装备
ADS
原位观测平台
原位观测平台